Introduction & Background
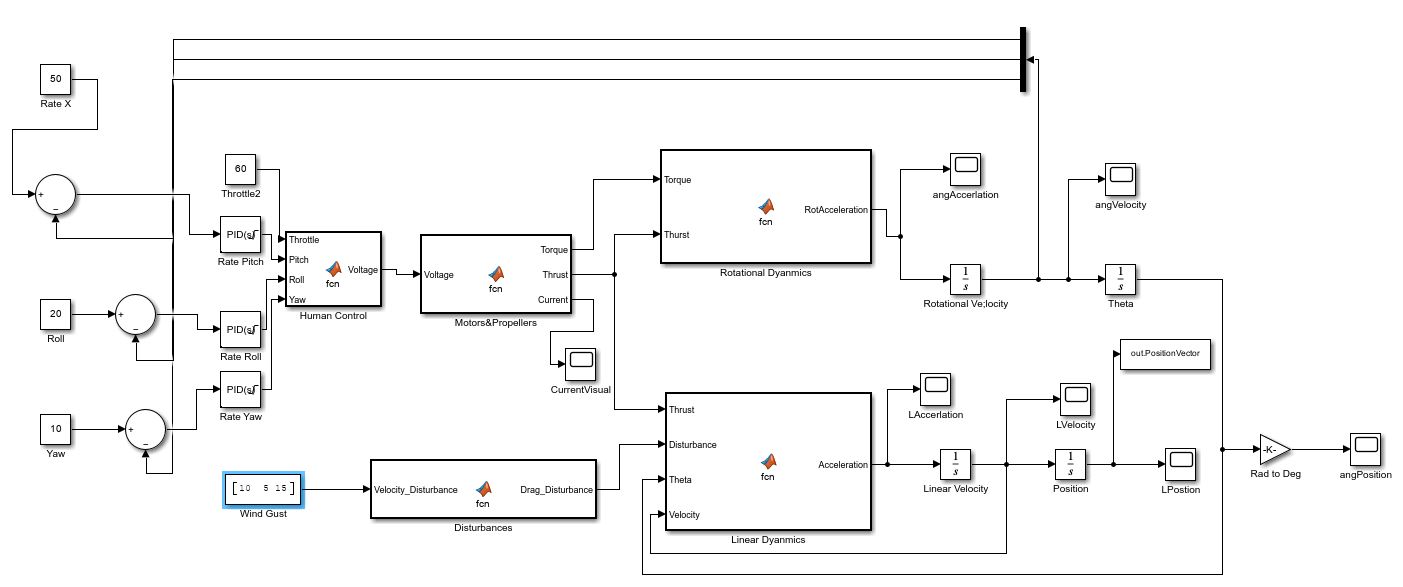
The goal of my project was to optimize drone controllers to improve stability. With drones being increasingly used in various sectors such as military and delivery services, there is a growing need for accurate control systems. I implemented various controllers and explored two approaches to achieve this.