Introduction & Background
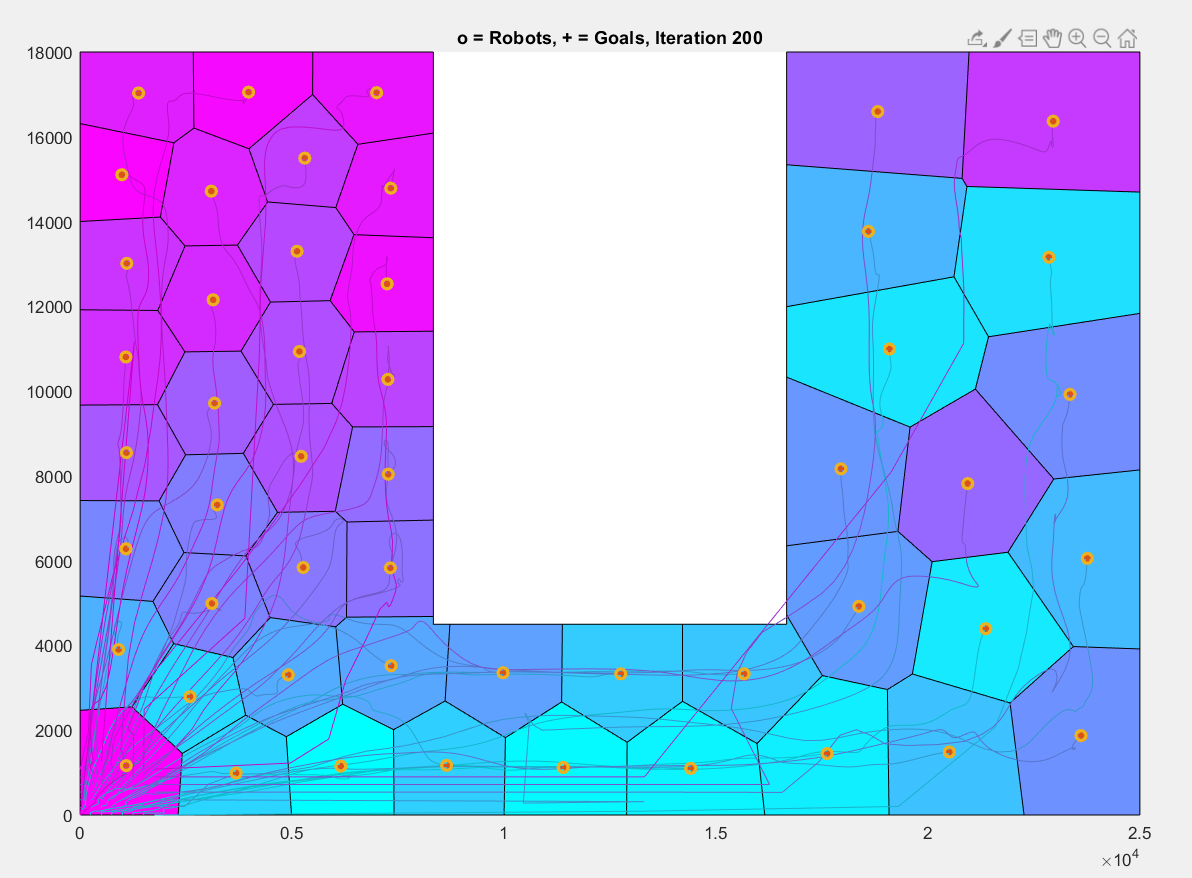
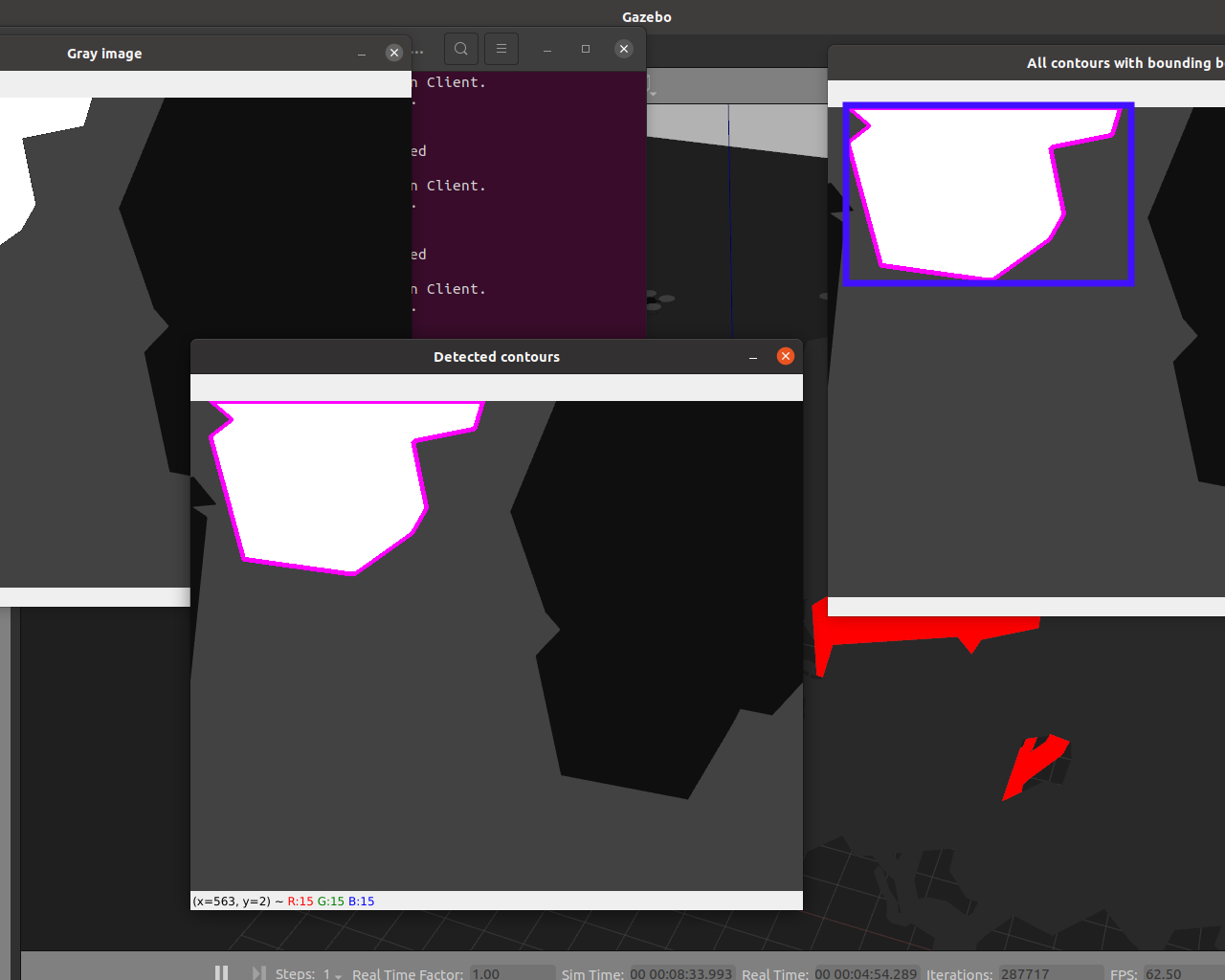
In this project, I aimed to develop a drone-assisted system for fighting wildfires using the Robot Operating System (ROS). Utilizing multiple UAVs, I focused on detecting and monitoring wildfires to facilitate early intervention and suppression. The project leveraged Voronoi Partitioning Algorithm to optimize the deployment of UAVs, ensuring efficient and unbiased coverage of the affected area.
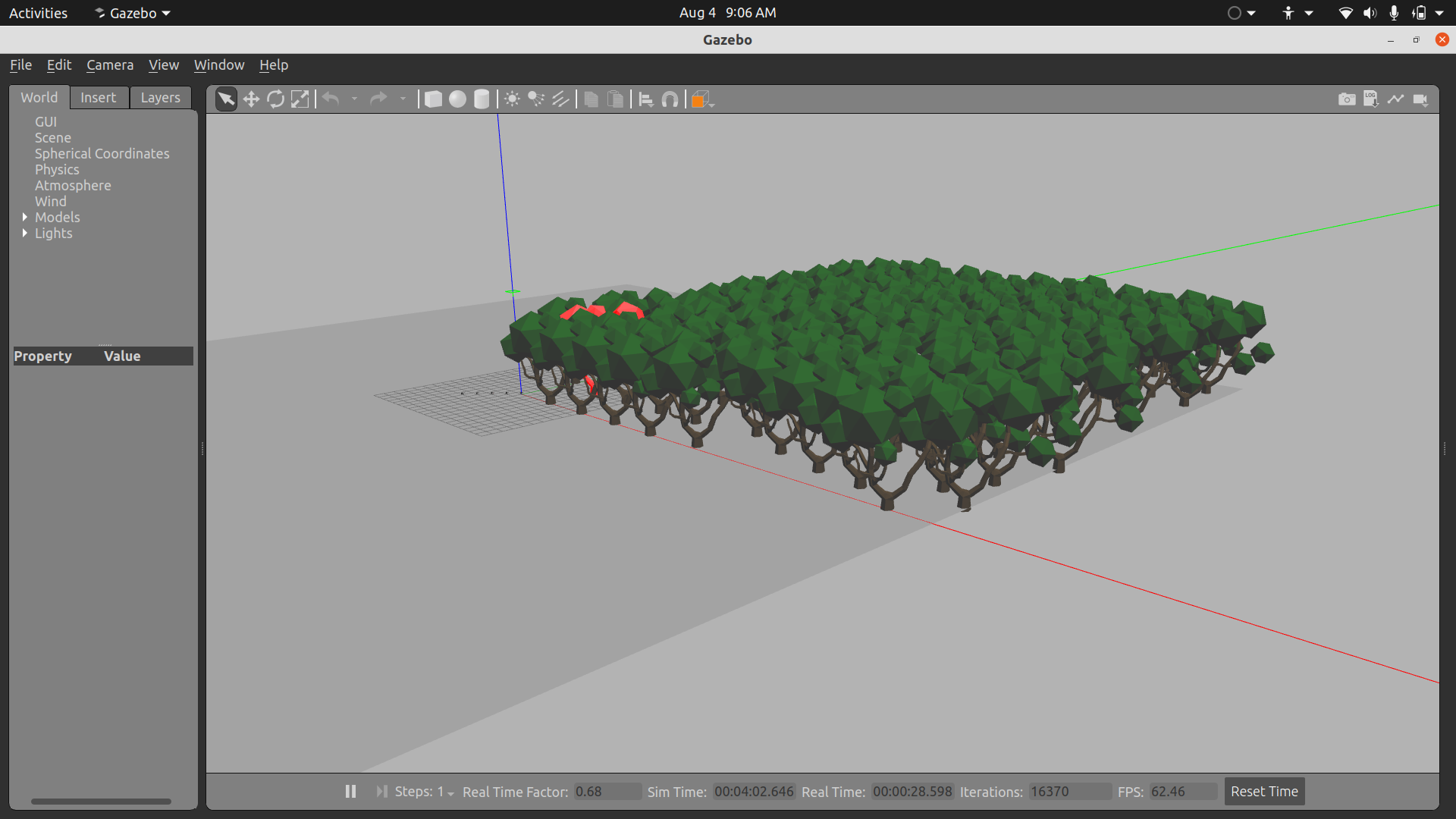
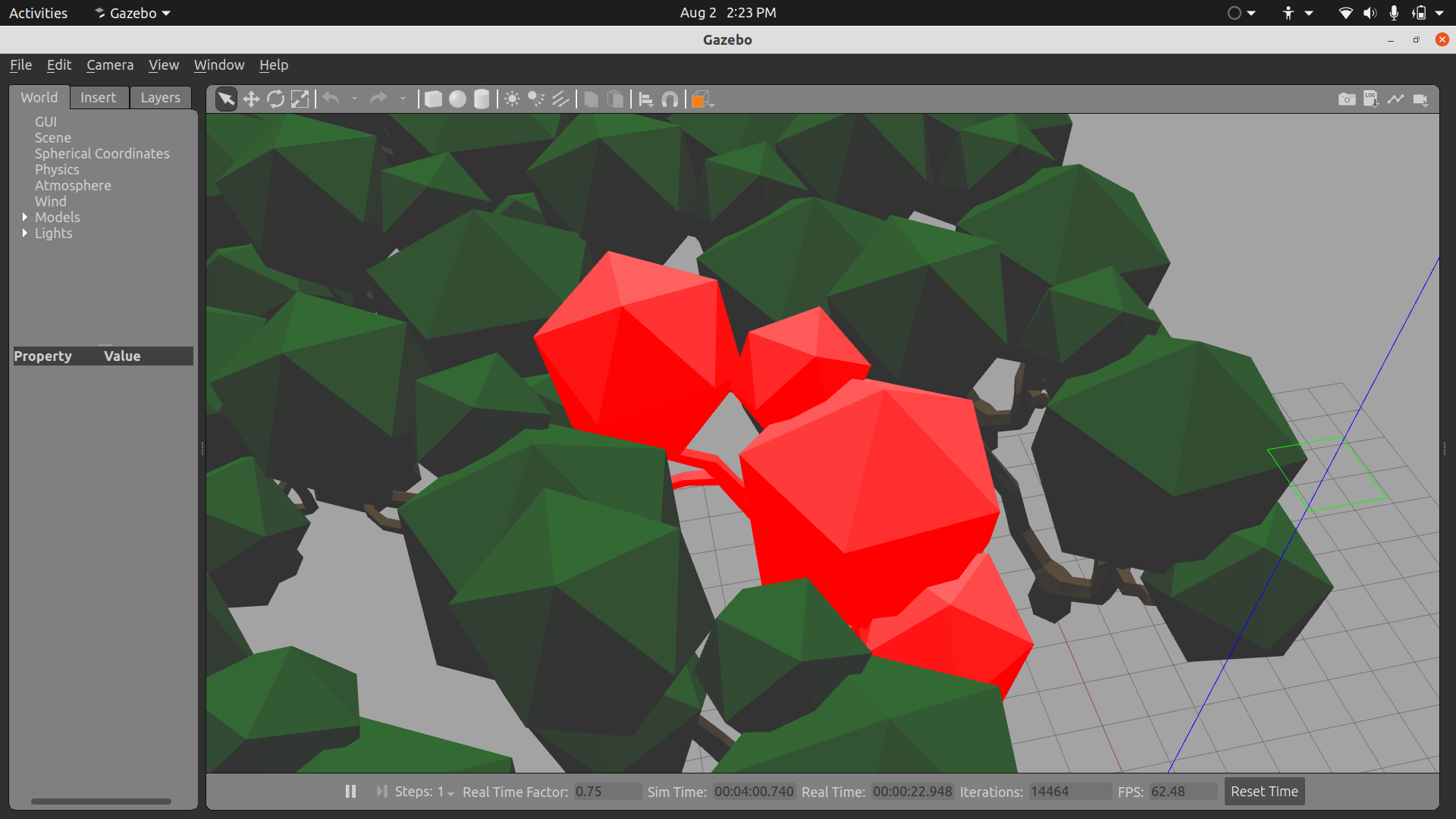
Multiple UAVs have been extensively used to recognize spot fires and screen out of control fire hazards moving toward a structure, fence, forest, or firefighting crew via remote sensing.
Once the drone detects the fire-affected area, the course of action would be to extinguish the fire by using fire extinguishing balls. The ball is made up of Styrofoam which is environmentally friendly and biodegradable. There are currently two brands that dominate this market, namely: The Elide and the AFO.
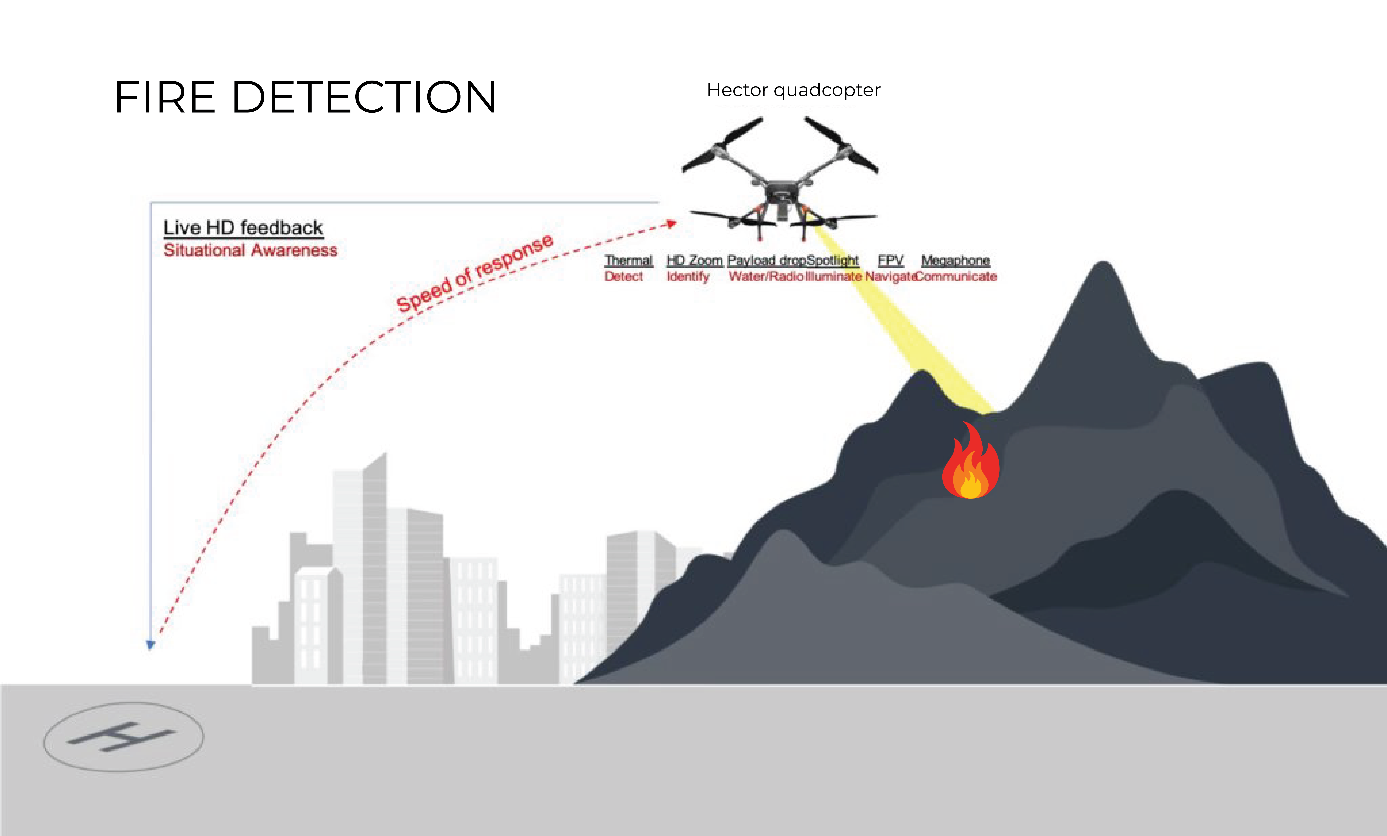
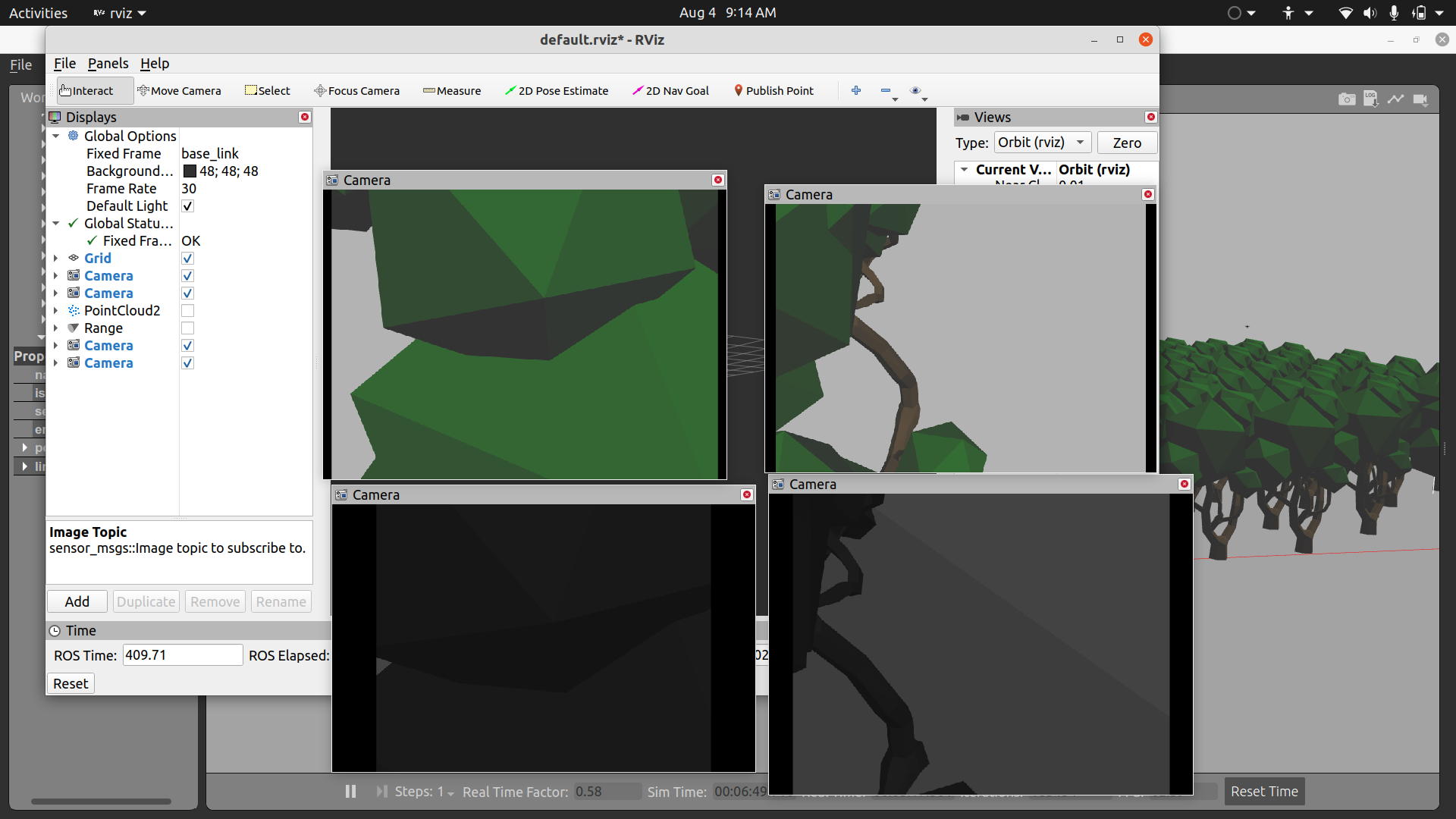
Concept for fire detection