Introduction
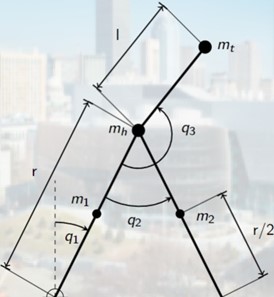
In this project, we focused on modeling a planar robot as a three-link biped, assuming only one foot is in contact with the ground at any given time. We derived the equations of motion using Lagrangian formalism and computed the state space representation and zero dynamics equations. Our goal was to design optimization-based gaits and develop a non-linear feedback controller to maintain stability.