Problem Statement
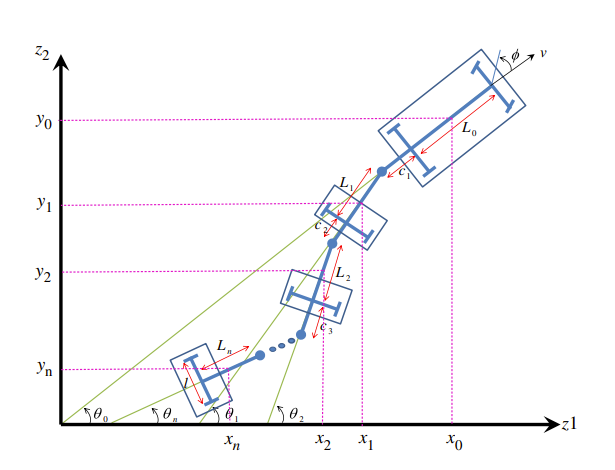
The objective of my project was to find a path for the robot that considers the trajectories of the trailers and avoids collisions.
.png)
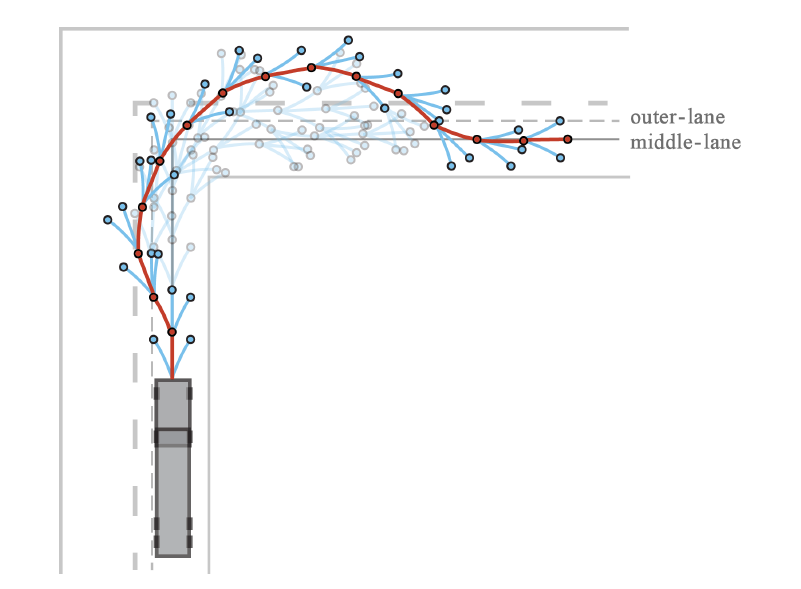
Path planning for just the robot
.png)
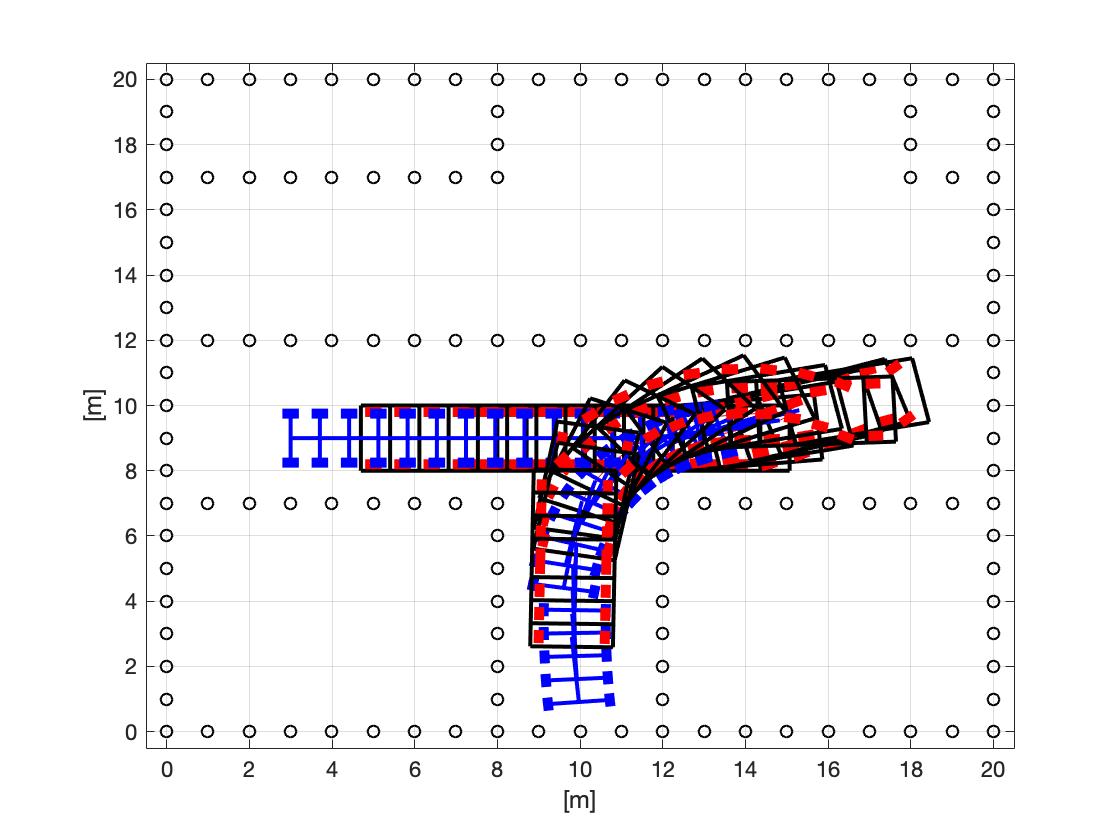
Path planning including trailer trajectories.
.png)
.png)